很久没有写 Blog 了, 今天写一波
Salient Object Detection
显著性检测的定义是检测出一张图片中最显著的物体, 其实就可以当作二分类分割问题. 看了几篇paper之后发现用到的网络其实也和语义分割的很相似, 都是Encoder-Decoder 结构, 也有类似 Attention、 ASPP 这种 module, 于是拿来一篇 CVPR 2019 的 Paper, 叫 Cascaded Partial Decoder. 文章宣称的是快速 SOD, VGG Backbone 的速度可以达到 105 FPS, 算是一个比较快的显著性网络。
Why So Fast?
显著性检测其实和语义分割问题一样, 都依赖于网络提供精确的物体边界. 文章做了一个实验, 拿一张 Image 过一个VGG, 输出 Activation Map, 发现网络的中间层依然可以保留比较准确的边缘信息, 那这样这些浅层的、分辨率高、抽象程度低的 feature 就不需要在 Decoder 端使用, 这样就可以节省计算量。
然后在网络的设计上, 作者通过 Backbone 上拉出两个分支, 分别接上 Partial Decoder, 第一个 Partial Decoder 得到初始的 Saliency Map, 通过 HAM 生成更精细的第二个 Saliency Map, 其实第一个可以看成生成的 Attention.
为了加速, 每个Decoder分支都先用 1X1卷积 将通道数降到 32, 然后文章里的 RFB 多尺度, 其实就是类似 Inception 的东西, 为了节省参数和降低计算量用到了把 5X5卷积 替换为 1X5 和 5X1 的操作, 最后再带上空洞卷积提升感受野.
训练的时候是同时监督两个分支的 Saliency Map,注意力分支为检测分支提供精确的 Attention Map, 检测分支反过来有助于注意力分支集中于显著对象.
Training
文章训练用的是 DUTS-TR, 也是最常用的显著性数据集,测试用的也是最常见的 ECSSD + HKU-IS + DUT-OMRON + DUTS-TE + PASCAL-S 的组合. 先复现一下原paper的精度, Loss 就只放 MAE 的
| Model BackBone |
Train Data |
DUT OMRON |
DUTS-TE | ECSSD | HKU-IS | PASCAL-S | SOD |
|---|---|---|---|---|---|---|---|
| CPD(paper) ResNet |
DUTS-TE | 0.056 | 0.043 | 0.037 | 0.034 | 0.072 | - |
| CPD(复现) ResNet |
DUTS-TE | 0.0549 | 0.0433 | 0.0429 | 0.0336 | 0.0756 | 0.1092 |
好像还行.
但是又不发paper, 为啥不多拿几个数据集放在一起训一波?
收集了一波显著性开源数据集, DUTS-TE + MSRA-B + HKU + NJU2K + MSRA10K,操作起来
| Model BackBone |
Train Data |
DUT OMRON |
DUTS-TE | ECSSD | HKU-IS | PASCAL-S | SOD |
|---|---|---|---|---|---|---|---|
| CPD ResNet |
DUTS+MSRA-B+ HKU+NJU2K+MSRA10K |
0.0508 | 0.0411 | 0.037 | 0.0265 | 0.0675 | 0.1032 |
有一些提升
那再快一点?把backbone改成 MobileNetV2
| Model BackBone |
Train Data |
DUT OMRON |
DUTS-TE | ECSSD | HKU-IS | PASCAL-S | SOD |
|---|---|---|---|---|---|---|---|
| CPD MobileNetV2 |
DUTS+MSRA-B+ HKU+NJU2K+MSRA10K |
0.0545 | 0.0485 | 0.0389 | 0.0289 | 0.0702 | 0.1051 |
性能稍微差了一点, 正常
Results
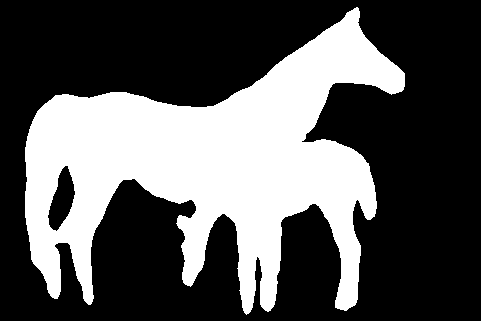
看一下一些测试集上的效果 (卡了threshold的结果)


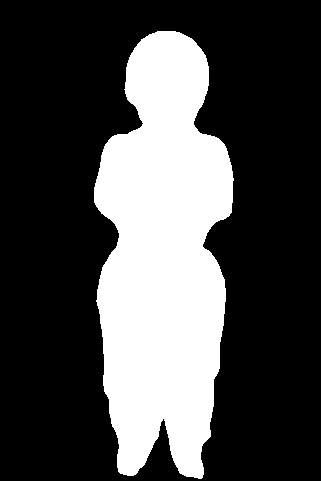
再看看破烂自然图像(小姐姐)的结果




感觉效果还不错?
暑假学校还要干活?还让不让找工作了(滑稽
好气啊!